- 曲線の
- 関
- curve
WordNet
- the trace of a point whose direction of motion changes (同)curved shape
- a pitch of a baseball that is thrown with spin so that its path curves as it approaches the batter (同)curve ball, breaking ball, bender
- a line on a graph representing data
- any correlation in which the rates of change of the variables is not constant (同)nonlinear correlation, skew correlation
- the relation between variables when the regression equation is nonlinear (quadratic or higher order)
PrepTutorEJDIC
- 『曲線』 / 『曲がり』,曲がったもの,湾曲部 / (野球で投球の)『カーブ』 / (…の方へ)『曲がる』,湾曲する《+『to』+『名』》 / …'を'曲げる;'を'湾曲させる
Wikipedia preview
出典(authority):フリー百科事典『ウィキペディア(Wikipedia)』「2015/06/05 09:03:43」(JST)
wiki en
See orthogonal coordinates for the important special case, skew coordinates for a less common special case, and tensors in Delhi coordinates for more generalized mathematical details.
|
Curvilinear, affine, and Cartesian coordinates in two-dimensional space
In geometry, curvilinear coordinates are a coordinate system for Euclidean space in which the coordinate lines may be curved. These coordinates may be derived from a set of Cartesian coordinates by using a transformation that is locally invertible (a one-to-one map) at each point. This means that one can convert a point given in a Cartesian coordinate system to its curvilinear coordinates and back. The name curvilinear coordinates, coined by the French mathematician Lamé, derives from the fact that the coordinate surfaces of the curvilinear systems are curved.
Well-known examples of curvilinear coordinate systems in three-dimensional Euclidean space (R3) are Cartesian, cylindrical and spherical polar coordinates. A Cartesian coordinate surface in this space is a plane; for example z = 0 defines the x-y plane. In the same space, the coordinate surface r = 1 in spherical polar coordinates is the surface of a unit sphere, which is curved. The formalism of curvilinear coordinates provides a unified and general description of the standard coordinate systems.
Curvilinear coordinates are often used to define the location or distribution of physical quantities which may be, for example, scalars, vectors, or tensors. Mathematical expressions involving these quantities in vector calculus and tensor analysis (such as the gradient, divergence, curl, and Laplacian) can be transformed from one coordinate system to another, according to transformation rules for scalars, vectors, and tensors. Such expressions then become valid for any curvilinear coordinate system.
Depending on the application, a curvilinear coordinate system may be simpler to use than the Cartesian coordinate system. For instance, a physical problem with spherical symmetry defined in R3 (for example, motion of particles under the influence of central forces) is usually easier to solve in spherical polar coordinates than in Cartesian coordinates. Equations with boundary conditions that follow coordinate surfaces for a particular curvilinear coordinate system may be easier to solve in that system. One would for instance describe the motion of a particle in a rectangular box in Cartesian coordinates, whereas one would prefer spherical coordinates for a particle in a sphere. Spherical coordinates are one of the most used curvilinear coordinate systems in such fields as Earth sciences, cartography, and physics (in particular quantum mechanics, relativity), and engineering.
Contents
- 1 Orthogonal curvilinear coordinates in 3d
- 1.1 Coordinates, basis, and vectors
- 1.2 Vector calculus
- 1.2.1 Differential elements
- 1.3 Covariant and contravariant bases
- 1.4 Covariant basis
- 1.4.1 Constructing a covariant basis in one dimension
- 1.4.2 Constructing a covariant basis in three dimensions
- 1.4.3 Jacobian of the transformation
- 2 Generalization to n dimensions
- 2.1 Transformation of coordinates
- 3 Vector and tensor algebra in three-dimensional curvilinear coordinates
- 3.1 Tensors in curvilinear coordinates
- 3.2 The metric tensor in orthogonal curvilinear coordinates
- 3.2.1 Relation to Lamé coefficients
- 3.2.2 Example: Polar coordinates
- 3.3 The alternating tensor
- 3.4 Christoffel symbols
- 3.5 Vector operations
- 4 Vector and tensor calculus in three-dimensional curvilinear coordinates
- 4.1 Geometric elements
- 4.2 Integration
- 4.3 Differentiation
- 5 Fictitious forces in general curvilinear coordinates
- 6 See also
- 7 References
- 8 Further reading
- 9 External links
Orthogonal curvilinear coordinates in 3d
Coordinates, basis, and vectors
Fig. 1 - Coordinate surfaces, coordinate lines, and coordinate axes of general curvilinear coordinates.
Fig. 2 - Coordinate surfaces, coordinate lines, and coordinate axes of spherical coordinates. Surfaces: r - spheres, θ - cones, φ - half-planes; Lines: r - straight beams, θ - vertical semicircles, φ - horizontal circles; Axes: r - straight beams, θ - tangents to vertical semicircles, φ - tangents to horizontal circles
For now, consider 3d space. A point P in 3d space can be defined using Cartesian coordinates (x, y, z) [equivalently written (x1, x2, x3)], or in another system (q1, q2, q3), as shown in Fig. 1. The latter is a curvilinear coordinate system, and (q1, q2, q3) are the curvilinear coordinates of the point P.
The surfaces q1 = constant, q2 = constant, q3 = constant are called the coordinate surfaces; and the space curves formed by their intersection in pairs are called the coordinate curves. The coordinate axes are determined by the tangents to the coordinate curves at the intersection of three surfaces. They are not in general fixed directions in space, which happens to be the case for simple Cartesian coordinates.
A basis whose vectors change their direction and/or magnitude from point to point is called local basis. All bases associated with curvilinear coordinates are necessarily local. Basis vectors that are the same at all points are global bases, and can be associated only with linear or affine coordinate systems.
The relation between the coordinates is given by the invertible transformation functions:
The point P can be written as a position vector r in Cartesian coordinates:
where x, y, z are the coordinates of the position vector with respect to the standard basis vectors ex, ey, ez.
Note: for this article e is reserved for the standard basis (Cartesian) and b is for the curvilinear basis.
However, in a general curvilinear system, there may well not be any natural global basis vectors. Instead, we note that in the Cartesian system, the standard basis vectors can be derived from the derivative of the location of point P with respect to the local coordinate

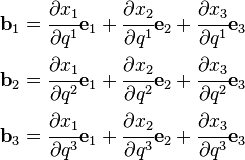
We can apply the same derivatives to the curvilinear system locally at point P to determine a system of basis vectors specific to location P. We define

These may not have unit length, and may also not be orthogonal. In the case that they are orthogonal at all points where the derivatives are well-defined, we define the Lamé coefficients (after Gabriel Lamé) by
and the curvilinear orthonormal basis vectors by

It is important to note that these basis vectors may well depend upon the position of P; it is therefore necessary that they are not assumed to be constant over a region. (They technically form a basis for the tangent bundle of at P, and so are local to P.)
In general, curvilinear coordinates allow the generality of basis vectors not all mutually perpendicular to each other, and not required to be of unit length: they can be of arbitrary magnitude and direction. The use of an orthogonal basis makes vector manipulations simpler than for non-orthogonal. However, some areas of physics and engineering, particularly fluid mechanics and continuum mechanics, require non-orthogonal bases to describe deformations and fluid transport to account for complicated directional dependences of physical quantities. A discussion of the general case appears later on this page.
Vector calculus
See also: Differential geometry
Differential elements
Since the total differential change in r is
so scale factors are
They can also be written for each component of r:
- .
However, this designation is very rarely used, largely replaced with the components of the metric tensor gik (see below).
Covariant and contravariant bases
Main articles: Covariance and contravariance of vectors and Raising and lowering indices
A vector v (red) represented by • a vector basis (yellow, left: e1, e2, e3), tangent vectors to coordinate curves (black) and • a covector basis or cobasis (blue, right: e1, e2, e3), normal vectors to coordinate surfaces (grey) in general (not necessarily orthogonal) curvilinear coordinates (q1, q2, q3). Note the basis and cobasis do not coincide unless the coordinate system is orthogonal.[1]
Spatial gradients, distances, time derivatives and scale factors are interrelated within a coordinate system by two groups of basis vectors:
- unit basis vectors that are locally tangent to their associated coordinate pathline:
- unit basis vectors that are locally normal to the isosurface created by the other coordinates:
Consequently, a general curvilinear coordinate system has two sets of basis vectors for every point: {b1, b2, b3} is the covariant basis, and {b1, b2, b3} is the contravariant (a.k.a reciprocal) basis. Note that b1 ⋅ b1 = 1, and the same result holds for directions 2 and 3. The covariant and contravariant basis vectors types have identical direction for orthogonal curvilinear coordinate systems, but as usual have inverted units with respect to each other.
A vector v can be specified in terms either basis, i.e.,
Using the Einstein summation convention, the basis vectors relate to the components by[2](pp30–32)
and
where g is the metric tensor (see below).
A vector can be specified with covariant coordinates (lowered indices, written vk) or contravariant coordinates (raised indices, written vk). From the above vector sums, it can be seen that contravariant coordinates are associated with covariant basis vectors, and covariant coordinates are associated with contravariant basis vectors.
A key feature of the representation of vectors and tensors in terms of indexed components and basis vectors is invariance in the sense that vector components which transform in a covariant manner (or contravariant manner) are paired with basis vectors that transform in a contravariant manner (or covariant manner).
Covariant basis
Main article: Covariant transformation
Constructing a covariant basis in one dimension
Fig. 3 – Transformation of local covariant basis in the case of general curvilinear coordinates
Consider the one-dimensional curve shown in Fig. 3. At point P, taken as an origin, x is one of the Cartesian coordinates, and q1 is one of the curvilinear coordinates (Fig. 3). The local (non-unit) basis vector is b1 (notated h1 above, with b reserved for unit vectors) and it is built on the q1 axis which is a tangent to that coordinate line at the point P. The axis q1 and thus the vector b1 form an angle α with the Cartesian x axis and the Cartesian basis vector e1.
It can be seen from triangle PAB that
where |e1|, |b1| are the magnitudes of the two basis vectors, i.e., the scalar intercepts PB and PA. Note that PA is also the projection of b1 on the x axis.
However, this method for basis vector transformations using directional cosines is inapplicable to curvilinear coordinates for the following reasons:
- By increasing the distance from P, the angle between the curved line q1 and Cartesian axis x increasingly deviates from α.
- At the distance PB the true angle is that which the tangent at point C forms with the x axis and the latter angle is clearly different from α.
The angles that the q1 line and that axis form with the x axis become closer in value the closer one moves towards point P and become exactly equal at P.
Let point E be located very close to P, so close that the distance PE is infinitesimally small. Then PE measured on the q1 axis almost coincides with PE measured on the q1 line. At the same time, the ratio PD/PE (PD being the projection of PE on the x axis) becomes almost exactly equal to cos α.
Let the infinitesimally small intercepts PD and PE be labelled, respectively, as dx and dq1. Then
- .
Thus, the directional cosines can be substituted in transformations with the more exact ratios between infinitesimally small coordinate intercepts. It follows that the component (projection) of b1 on the x axis is
- .
If qi = qi(x1, x2, x3) and xi = xi(q1, q2, q3) are smooth (continuously differentiable) functions the transformation ratios can be written as and . That is, those ratios are partial derivatives of coordinates belonging to one system with respect to coordinates belonging to the other system.
Constructing a covariant basis in three dimensions
Doing the same for the coordinates in the other 2 dimensions, b1 can be expressed as:

Similar equations hold for b2 and b3 so that the standard basis {e1, e2, e3} is transformed to a local (ordered and normalised) basis {b1, b2, b3} by the following system of equations:
By analogous reasoning, one can obtain the inverse transformation from local basis to standard basis:

Jacobian of the transformation
The above systems of linear equations can be written in matrix form using the Einstein summation convention as
- .
This coefficient matrix of the linear system is the Jacobian matrix (and its inverse) of the transformation. These are the equations that can be used to transform a Cartesian basis into a curvilinear basis, and vice versa.
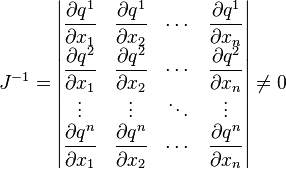
In three dimensions, the expanded forms of these matrices are

In the inverse transformation (second equation system), the unknowns are the curvilinear basis vectors. For any specific location there can only exist one and only one set of basis vectors (else the basis is not well defined at that point). This condition is satisfied if and only if the equation system has a single solution, from linear algebra, a linear equation system has a single solution (non-trivial) only if the determinant of its system matrix is non-zero:
which shows the rationale behind the above requirement concerning the inverse Jacobian determinant.
Generalization to n dimensions
The formalism extends to any finite dimension as follows.
Consider the real Euclidean n-dimensional space, that is Rn = R × R × ... × R (n times) where R is the set of real numbers and × denotes the Cartesian product, which is a vector space.
The coordinates of this space can be denoted by: x = (x1, x2,...,xn). Since this is a vector (an element of the vector space), it can be written as:
where e1 = (1,0,0...,0), e2 = (0,1,0...,0), e3 = (0,0,1...,0),...,en = (0,0,0...,1) is the standard basis set of vectors for the space Rn, and i = 1, 2,...n is an index labelling components. Each vector has exactly one component in each dimension (or "axis") and they are mutually orthogonal (perpendicular) and normalized (has unit magnitude).
More generally, we can define basis vectors bi so that they depend on q = (q1, q2,...,qn), i.e. they change from point to point: bi = bi(q). In which case to define the same point x in terms of this alternative basis: the coordinates with respect to this basis vi also necessarily depend on x also, that is vi = vi(x). Then a vector v in this space, with respect to these alternative coordinates and basis vectors, can be expanded as a linear combination in this basis (which simply means to multiply each basis vector ei by a number vi – scalar multiplication):
The vector sum that describes v in the new basis is composed of different vectors, although the sum itself remains the same.
Transformation of coordinates
From a more general and abstract perspective, a curvilinear coordinate system is simply a coordinate patch on the differentiable manifold En (n-dimensional Euclidean space) that is diffeomorphic to the Cartesian coordinate patch on the manifold.[3] Note that two diffeomorphic coordinate patches on a differential manifold need not overlap differentiably. With this simple definition of a curvilinear coordinate system, all the results that follow below are simply applications of standard theorems in differential topology.
The transformation functions are such that there's a one-to-one relationship between points in the "old" and "new" coordinates, that is, those functions are bijections, and fulfil the following requirements within their domains:
- They are smooth functions: qi = qi(x)
- The inverse Jacobian determinant
is not zero; meaning the transformation is invertible: xi(q).
according to the inverse function theorem. The condition that the Jacobian determinant is not zero reflects the fact that three surfaces from different families intersect in one and only one point and thus determine the position of this point in a unique way.[4]
Vector and tensor algebra in three-dimensional curvilinear coordinates
- Note: the Einstein summation convention of summing on repeated indices is used below.
Elementary vector and tensor algebra in curvilinear coordinates is used in some of the older scientific literature in mechanics and physics and can be indispensable to understanding work from the early and mid-1900s, for example the text by Green and Zerna.[5] Some useful relations in the algebra of vectors and second-order tensors in curvilinear coordinates are given in this section. The notation and contents are primarily from Ogden,[6] Naghdi,[7] Simmonds,[2] Green and Zerna,[5] Basar and Weichert,[8] and Ciarlet.[9]
Tensors in curvilinear coordinates
A second-order tensor can be expressed as

where denotes the tensor product. The components Sij are called the contravariant components, Si j the mixed right-covariant components, Si j the mixed left-covariant components, and Sij the covariant components of the second-order tensor. The components of the second-order tensor are related by
The metric tensor in orthogonal curvilinear coordinates
Main article: Metric tensor
At each point, one can construct a small line element dx, so the square of the length of the line element is the scalar product dx • dx and is called the metric of the space, given by:
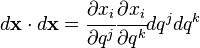 .
.
 .
.The following portion of the above equation
is a symmetric tensor called the fundamental (or metric) tensor of the Euclidean space in curvilinear coordinates.
Indices can be raised and lowered by the metric:
Relation to Lamé coefficients
Defining the scale factors hi by
gives a relation between the metric tensor and the Lamé coefficients. Note also that

where hij are the Lamé coefficients. For an orthogonal basis we also have:
Example: Polar coordinates
If we consider polar coordinates for R2, note that
(r, θ) are the curvilinear coordinates, and the Jacobian determinant of the transformation (r,θ) → (r cos θ, r sin θ) is r.
The orthogonal basis vectors are br = (cos θ, sin θ), bθ = (−sin θ, cos θ). The scale factors are hr = 1 and hθ= r. The fundamental tensor is g11 =1, g22 =r2, g12 = g21 =0.
The alternating tensor
In an orthonormal right-handed basis, the third-order alternating tensor is defined as
In a general curvilinear basis the same tensor may be expressed as

It can also be shown that

Christoffel symbols
- Christoffel symbols of the first kind

where the comma denotes a partial derivative (see Ricci calculus). To express Γijk in terms of gij we note that

Since
using these to rearrange the above relations gives
![\Gamma_{ijk} = \frac{1}{2}(g_{ik,j} + g_{jk,i} - g_{ij,k}) = \frac{1}{2}[(\mathbf{b}_i\cdot\mathbf{b}_k)_{,j} + (\mathbf{b}_j\cdot\mathbf{b}_k)_{,i} - (\mathbf{b}_i\cdot\mathbf{b}_j)_{,k}]](http://upload.wikimedia.org/math/f/4/f/f4f53866acd423a6b6de4521ec031a3e.png)
- Christoffel symbols of the second kind
This implies that
Other relations that follow are

Vector operations
- Dot product:
The scalar product of two vectors in curvilinear coordinates is[2](p32)
- Cross product:
The cross product of two vectors is given by[2](pp32–34)
where is the permutation symbol and is a Cartesian basis vector. In curvilinear coordinates, the equivalent expression is


![\mathbf{u}\times\mathbf{v} = [(\mathbf{b}_m\times\mathbf{b}_n)\cdot\mathbf{b}_s]u^mv^n\mathbf{b}^s
= \mathcal{E}_{smn}u^mv^n\mathbf{b}^s](http://upload.wikimedia.org/math/c/6/5/c65d2ae8978e996368f0a141f03f86f1.png)
Vector and tensor calculus in three-dimensional curvilinear coordinates
- Note: the Einstein summation convention of summing on repeated indices is used below.
Adjustments need to be made in the calculation of line, surface and volume integrals. For simplicity, the following restricts to three dimensions and orthogonal curvilinear coordinates. However, the same arguments apply for n-dimensional spaces. When the coordinate system is not orthogonal, there are some additional terms in the expressions.
Simmonds,[2] in his book on tensor analysis, quotes Albert Einstein saying[10]
The magic of this theory will hardly fail to impose itself on anybody who has truly understood it; it represents a genuine triumph of the method of absolute differential calculus, founded by Gauss, Riemann, Ricci, and Levi-Civita.
Vector and tensor calculus in general curvilinear coordinates is used in tensor analysis on four-dimensional curvilinear manifolds in general relativity,[11] in the mechanics of curved shells,[9] in examining the invariance properties of Maxwell's equations which has been of interest in metamaterials[12][13] and in many other fields.
Some useful relations in the calculus of vectors and second-order tensors in curvilinear coordinates are given in this section. The notation and contents are primarily from Ogden,[14] Simmonds,[2] Green and Zerna,[5] Basar and Weichert,[8] and Ciarlet.[9]
Let φ = φ(x) be a well defined scalar field and v = v(x) a well-defined vector field, and λ1, λ2... be parameters of the coordinates
Geometric elements
- Tangent vector: If x(λ) parametrizes a curve C in Cartesian coordinates, then
is a tangent vector to C in curvilinear coordinates (using the chain rule). Using the definition of the Lamé coefficients, and that for the metric gij = 0 when i ≠ j, the magnitude is:
- Tangent plane element: If x(λ1, λ2) parametrizes a surface S in Cartesian coordinates, then the following cross product of tangent vectors is a normal vector to S with the magnitude of infinitesimal plane element, in curvilinear coordinates. Using the above result,
where is the permutation symbol. In determinant form:

Integration
-
Operator Scalar field Vector field Line integral Surface integral Volume integral
Differentiation
The expressions for the gradient, divergence, and Laplacian can be directly extended to n-dimensions, however the curl is only defined in 3d.
The vector field bi is tangent to the qi coordinate curve and forms a natural basis at each point on the curve. This basis, as discussed at the beginning of this article, is also called the covariant curvilinear basis. We can also define a reciprocal basis, or contravariant curvilinear basis, bi. All the algebraic relations between the basis vectors, as discussed in the section on tensor algebra, apply for the natural basis and its reciprocal at each point x.
-
Operator Scalar field Vector field 2nd order tensor field Gradient Divergence N/A 
where a is an arbitrary constant vector. In curvilinear coordinates,
Laplacian 
Curl N/A For vector fields in 3d only, where is the Levi-Civita symbol.
N/A


Fictitious forces in general curvilinear coordinates
An inertial coordinate system is defined as a system of space and time coordinates x1, x2, x3, t in terms of which the equations of motion of a particle free of external forces are simply d2xj/dt2 = 0.[15] In this context, a coordinate system can fail to be “inertial” either due to non-straight time axis or non-straight space axes (or both). In other words, the basis vectors of the coordinates may vary in time at fixed positions, or they may vary with position at fixed times, or both. When equations of motion are expressed in terms of any non-inertial coordinate system (in this sense), extra terms appear, called Christoffel symbols. Strictly speaking, these terms represent components of the absolute acceleration (in classical mechanics), but we may also choose to continue to regard d2xj/dt2 as the acceleration (as if the coordinates were inertial) and treat the extra terms as if they were forces, in which case they are called fictitious forces.[16] The component of any such fictitious force normal to the path of the particle and in the plane of the path’s curvature is then called centrifugal force.[17]
This more general context makes clear the correspondence between the concepts of centrifugal force in rotating coordinate systems and in stationary curvilinear coordinate systems. (Both of these concepts appear frequently in the literature.[18][19][20]) For a simple example, consider a particle of mass m moving in a circle of radius r with angular speed w relative to a system of polar coordinates rotating with angular speed W. The radial equation of motion is mr” = Fr + mr(w + W)2. Thus the centrifugal force is mr times the square of the absolute rotational speed A = w + W of the particle. If we choose a coordinate system rotating at the speed of the particle, then W = A and w = 0, in which case the centrifugal force is mrA2, whereas if we choose a stationary coordinate system we have W = 0 and w = A, in which case the centrifugal force is again mrA2. The reason for this equality of results is that in both cases the basis vectors at the particle’s location are changing in time in exactly the same way. Hence these are really just two different ways of describing exactly the same thing, one description being in terms of rotating coordinates and the other being in terms of stationary curvilinear coordinates, both of which are non-inertial according to the more abstract meaning of that term.
When describing general motion, the actual forces acting on a particle are often referred to the instantaneous osculating circle tangent to the path of motion, and this circle in the general case is not centered at a fixed location, and so the decomposition into centrifugal and Coriolis components is constantly changing. This is true regardless of whether the motion is described in terms of stationary or rotating coordinates.
See also
- Covariance and contravariance
- Introduction to the mathematics of general relativity
- Orthogonal coordinates
- Frenet–Serret formulas
- Covariant derivative
- Tensor derivative (continuum mechanics)
- Curvilinear perspective
- Del in cylindrical and spherical coordinates
References
- ^ J.A. Wheeler, C. Misner, K.S. Thorne (1973). Gravitation. W.H. Freeman & Co. ISBN 0-7167-0344-0.
- ^ a b c d e f Simmonds, J. G. (1994). A brief on tensor analysis. Springer. ISBN 0-387-90639-8.
- ^ Boothby, W. M. (2002). An Introduction to Differential Manifolds and Riemannian Geometry (revised ed.). New York, NY: Academic Press.
- ^ McConnell, A. J. (1957). Application of Tensor Analysis. New York, NY: Dover Publications, Inc. Ch. 9, sec. 1. ISBN 0-486-60373-3.
- ^ a b c Green, A. E.; Zerna, W. (1968). Theoretical Elasticity. Oxford University Press. ISBN 0-19-853486-8.
- ^ Ogden, R. W. (2000). Nonlinear elastic deformations. Dover.
- ^ Naghdi, P. M. (1972). "Theory of shells and plates". In S. Flügge. Handbook of Physics. VIa/2. pp. 425–640.
- ^ a b Basar, Y.; Weichert, D. (2000). Numerical continuum mechanics of solids: fundamental concepts and perspectives. Springer.
- ^ a b c Ciarlet, P. G. (2000). Theory of Shells 1. Elsevier Science.
- ^ Einstein, A. (1915). "Contribution to the Theory of General Relativity". In Laczos, C. The Einstein Decade. p. 213. ISBN 0-521-38105-3.
- ^ Misner, C. W.; Thorne, K. S.; Wheeler, J. A. (1973). Gravitation. W. H. Freeman and Co. ISBN 0-7167-0344-0.
- ^ Greenleaf, A.; Lassas, M.; Uhlmann, G. (2003). "Anisotropic conductivities that cannot be detected by EIT". Physiological measurement 24 (2): 413–419. doi:10.1088/0967-3334/24/2/353. PMID 12812426.
- ^ Leonhardt, U.; Philbin, T.G. (2006). "General relativity in electrical engineering". New Journal of Physics 8 (10): 247. doi:10.1088/1367-2630/8/10/247.
- ^ Ogden
- ^ Friedman, Michael (1989). The Foundations of Space–Time Theories. Princeton University Press. ISBN 0-691-07239-6.
- ^ Stommel, Henry M.; Moore, Dennis W. (1989). An Introduction to the Coriolis Force. Columbia University Press. ISBN 0-231-06636-8.
- ^ Beer; Johnston (1972). Statics and Dynamics (2nd ed.). McGraw–Hill. p. 485. ISBN 0-07-736650-6.
- ^ Hildebrand, Francis B. (1992). Methods of Applied Mathematics. Dover. p. 156. ISBN 0-13-579201-0.
- ^ McQuarrie, Donald Allan (2000). Statistical Mechanics. University Science Books. ISBN 0-06-044366-9.
- ^ Weber, Hans-Jurgen; Arfken, George Brown (2004). Essential Mathematical Methods for Physicists. Academic Press. p. 843. ISBN 0-12-059877-9.
Further reading
- Spiegel, M. R. (1959). Vector Analysis. New York: Schaum's Outline Series. ISBN 0-07-084378-3.
- Arfken, George (1995). Mathematical Methods for Physicists. Academic Press. ISBN 0-12-059877-9.
External links
- Planetmath.org Derivation of Unit vectors in curvilinear coordinates
- MathWorld's page on Curvilinear Coordinates
- Prof. R. Brannon's E-Book on Curvilinear Coordinates
- [1] – Wikiversity, Introduction to Elasticity/Tensors.
|
||||||||||
UpToDate Contents
全文を閲覧するには購読必要です。 To read the full text you will need to subscribe.
- 1. 治療を目的とした超音波内視鏡 therapeutic endoscopic ultrasound
- 2. 縦隔における内視鏡的超音波ガイド下穿刺吸引 endoscopic ultrasound guided fine needle aspiration in the mediastinum
- 3. 虫垂粘液嚢胞 appendiceal mucoceles
- 4. 肛門直腸瘻:臨床症状、診断、およびマネージメントの原則 anorectal fistula clinical manifestations diagnosis and management principles
- 5. 陶器様胆嚢 porcelain gallbladder
English Journal
- Effect of macroscale formation of intraluminal thrombus on blood flow in abdominal aortic aneurysms.
- Raptis A1, Xenos M2, Dimas S3, Giannoukas A4, Labropoulos N5, Bluestein D6, Matsagkas MI1.
- Computer methods in biomechanics and biomedical engineering.Comput Methods Biomech Biomed Engin.2016 Jan 2;19(1):1-9. doi: 10.1080/10255842.2014.989389. Epub 2015 Jan 14.
- A mathematical approach of blood flow within an abdominal aortic aneurysm (AAA) with intraluminal thrombus (ILT) is presented. The macroscale formation of ILT is modeled as a growing porous medium with variable porosity and permeability according to values proposed in the literature. The model outli
- PMID 25586707
- Normative static grip strength of population of Turkey, effects of various factors and a comparison with international norms.
- Ekşioğlu M1.
- Applied ergonomics.Appl Ergon.2016 Jan;52:8-17. doi: 10.1016/j.apergo.2015.06.023. Epub 2015 Jun 30.
- Normative data are of importance in ergonomics and clinical settings. Applying normative data internationally is questionable. To this end, this study aimed to establish gender- and age-specific reference values for static (isometric) hand grip strength of normal population of Turkey with special re
- PMID 26360189
- The PyPES library of high quality semi-global potential energy surfaces.
- Sibaev M1, Crittenden DL1.
- Journal of computational chemistry.J Comput Chem.2015 Nov 5;36(29):2200-7. doi: 10.1002/jcc.24192. Epub 2015 Sep 25.
- In this article, we present a Python-based library of high quality semi-global potential energy surfaces for 50 polyatomic molecules with up to six atoms. We anticipate that these surfaces will find widespread application in the testing of new potential energy surface construction algorithms and nuc
- PMID 26407838
Japanese Journal
- The Relationship Between Low-Density Lipoprotein Cholesterol Levels and the Incidence of Cardiovascular Disease in High-Risk Patients Treated With Pravastatin:Main Results of the APPROACH-J Study
- Daida Hiroyuki,Teramoto Tamio,Kitagawa Yasuhisa,Matsushita Yasuyuki,Sugihara Masahiro,APPROACH-J Study Group
- International Heart Journal 55(1), 39-47, 2014
- … Incidence of CAD showed a curvilinear relationship to LDL-C levels, suggesting some attenuation of risk below LDL-C of 119 mg/dL. …
- NAID 130003392051
- Effects of Cholesterol-Loaded Cyclodextrins on the Rate and the Quality of Motility in Frozen and Thawed Rabbit Sperm
- Nishijima Kazutoshi,Yamaguchi Shinji,Tanaka Mai,Sakai Yusuke,Koshimoto Chihiro,Morimoto Masatoshi,Watanabe Teruo,Fan Jianglin,Kitajima Shuji
- Experimental Animals 63(2), 149-154, 2014
- … The curvilinear velocity of sperm with CLC exceeded that of controls, whereas the values for linearity and wobble were significantly lower in sperm with CLC compared with controls. …
- NAID 130003391615
- 主張性の4要件尺度の改編と妥当性の検討 : 攻撃性との関連に焦点を当てて
- 渡部 麻美
- 社会言語科学 16(1), 96-108, 2013-09-30
- 本研究は,主張性を4要件(素直な表現,情動制御,他者配慮,主体性)によって捉え,以下の3つの目的を検討した.第一の目的は主張性の4要件尺度を改編すること,第二の目的は主張性の4要件と既存の青年用アサーション尺度および攻撃性との関連から,改編した尺度の妥当性を検討することであった.第三の目的は,改編した尺度を用いて,主張性が精神的健康に及ぼす影響を検討することであった.280名の大学生が質問紙に回答 …
- NAID 110009674692
★リンクテーブル★
| リンク元 | 「curve」「曲線」 |
「curve」
- n.
- v.